1.1.2.2 UART Bootloader Firmware Update mode execution flow
Bootloader Task Flow
Bootloader task is the main task which calls the 3 sub-tasks in a forever loop.
It always calls the Input task to poll for command packets from host
Once complete packet is received it calls Command task to process the received command
If the command received was a data command it calls programming task to flash the application
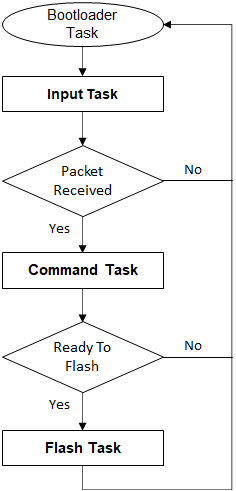
Input Task Flow
This task is used to receive the data bytes from host PC
If there are valid GUARD bytes received at start of packet it proceeds further to receive the whole packet or else reports error and waits for next command
All bytes of the command frame must be sent within 100 ms of each other. After 100 ms of idle time, incomplete command is discarded and bootloader goes back to waiting for a new Command. This behavior allows host to re-synchronize in the case of synchronization loss. (For MCUs)
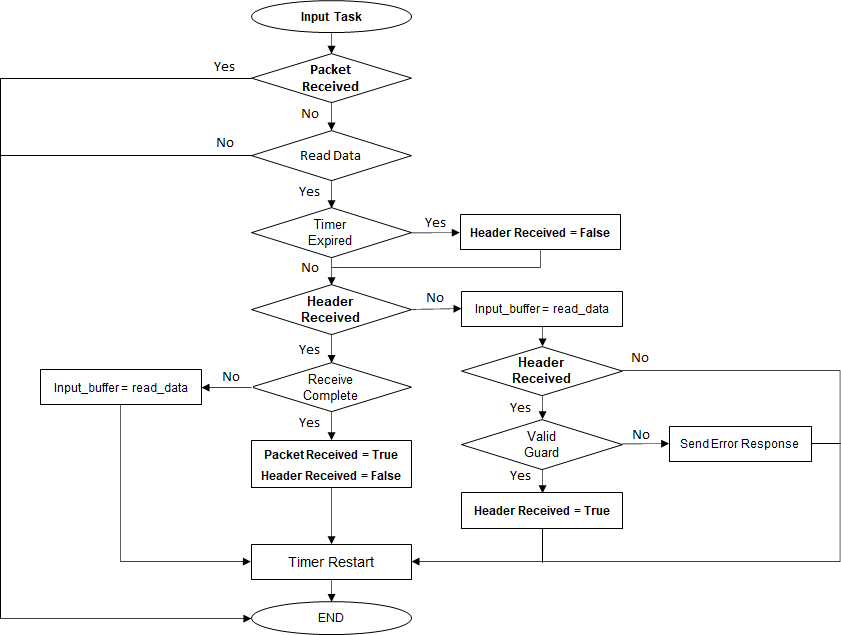
Command Task Flow
This task processes the packet received for supported commands
If the received command is a DATA command, it sets ready_to_flash flag so that the bootloader task can call Flash task
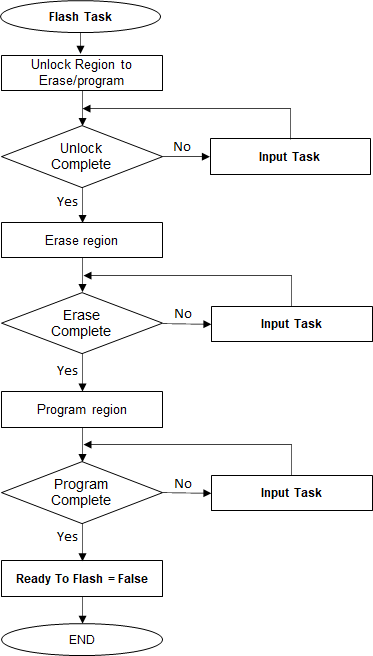
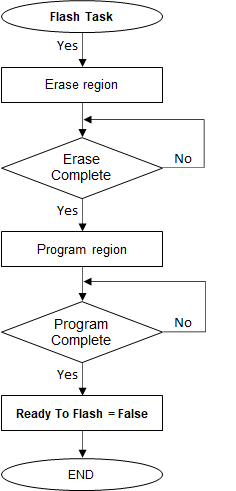
Flash Task Flow
This task performs flash operations on the received data
For CORTEX-M based MCUs
As the bootloader is running from RAM, While waiting for flash operations to complete it calls Input task to receive the next command in parallel
For MIPS based MCUs
For MPUs
Bootloader with SD/eMMC media
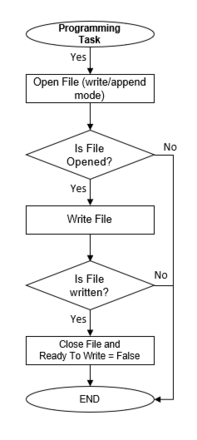
Bootloader with NAND/Serial Flash media