![]()
PMSM FOC using Quadrature Encoder
This example application shows how to control the Permanent Magnet Synchronous Motor (PMSM) with Quadrature Encoder based Field Oriented Control (FOC) on a SAM RH707 Micro-controller.
Description
Permanent Magnet Synchronous Motor (PMSM) is controlled using Field Oriented Control (FOC). Rotor position and speed is determined using quadrature encoder sensor. Motor start/stop operation is controlled by the switch and motor speed can be changed by the on-board potentiometer. Waveforms and variables can be monitored runtime using X2CScope.
Key features enabled in this project are:
- Dual shunt current measurement
- Speed control loop
- Field weakening
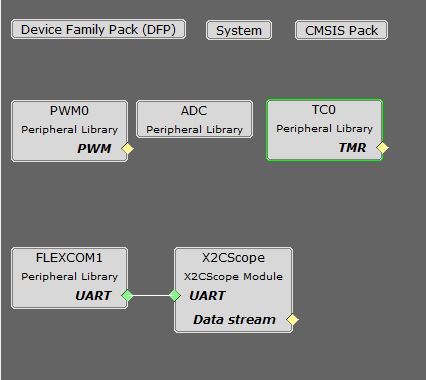
MCC Project Configurations
-
ADC:
ADC is hardware triggered from PWM at the end of each PWM cycle. It coverts phase U current, phase V current, DC bus voltage and potentiometer.
Conversion Ready interrupt is generated by ADC.
-
PWM0:
This peripheral is used to generated three phase synchronous PWM waveforms. Fault functionality is also enabled to switch off the output waveforms asynchronously.
-
TC0:
This peripheral is used in quadrature encoder mode. It decodes quadrature encoder signals to get the position of the rotor.
-
X2CScope:
This component adds X2C scope protocol code. This uses UART to communicate to the host PC. X2CScope allows user to monitor variables runtime.
-
FLEXCOM1 Peripheral:
The UART is used for X2CScope communication to observe graphs and variable values in run time
Project Details
For details refer Motor Control Plant
Development Kits
MCLV2 with ATSAMRH707 PIM
Downloading and building the application
To clone or download this application from Github, go to the main page of this repository and then click Clone button to clone this repository or download as zip file. This content can also be downloaded using content manager by following these instructions.
Path of the application within the repository is apps/pmsm_foc_encoder_sam_rh707 .
To build the application, refer to the following table and open the project using its IDE.
| Project Name | Description | Demo User Guide |
|---|---|---|
| mclv2_sam_rh707_pim.X | MPLABX project for MCLV2 board with ATSAMRH707 PIM | Hardware Setup and Running The Application on MCLV2 with ATSAMRH707 PIM |